Nice
代码实现 写在这里
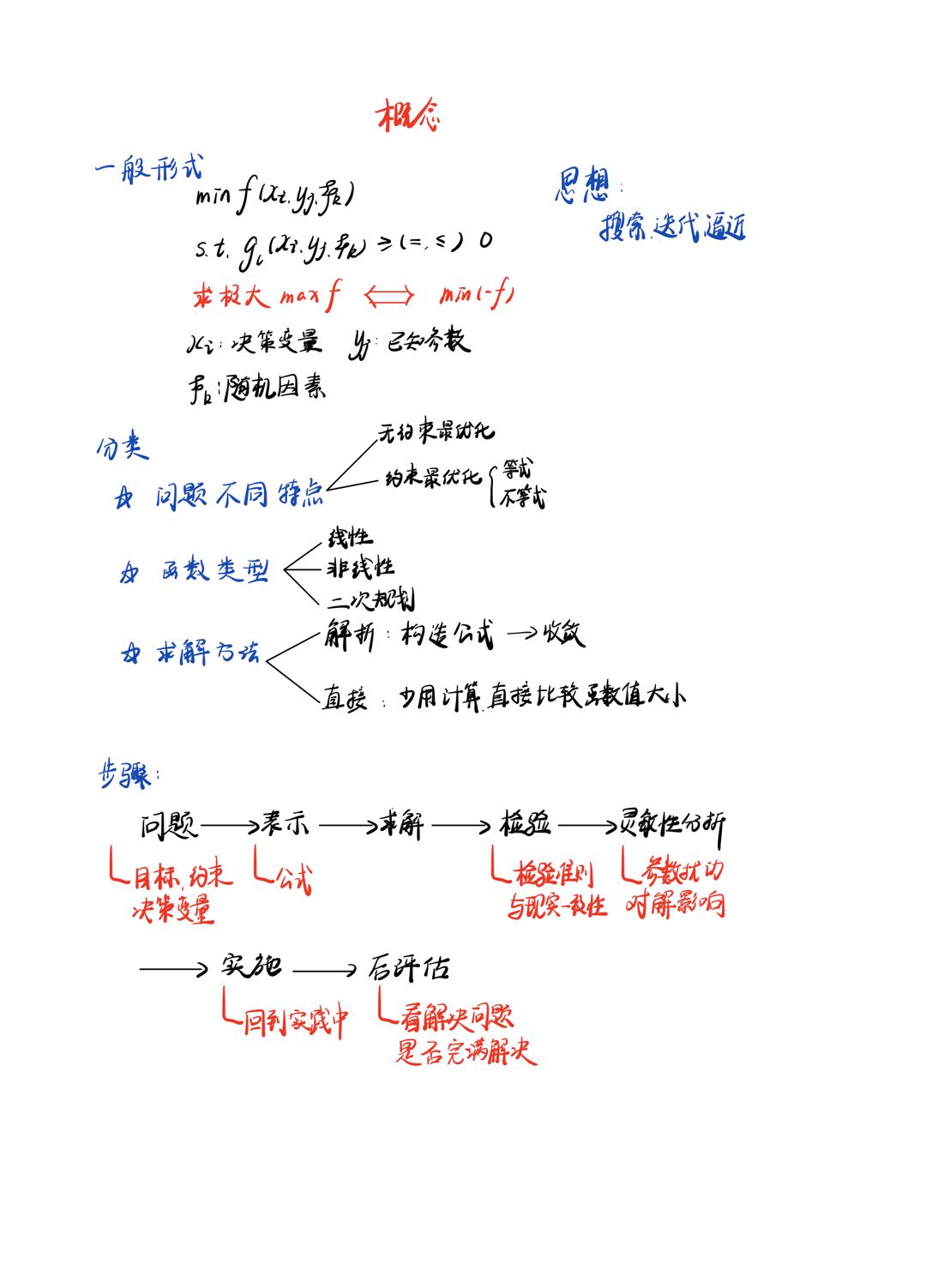
一 元 优 化 问 题
全 局 最 优 化
多 元 方 程 求 根
最 小 二 乘 法
无 约 束 、 带 约 束 的 多 元 优 化 算 法
二分法 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 def asdf (x ): res=8 *x**3 -2 *x**2 -7 *x+3 return res i=2 left=0 ,right=1 while i>0 : i = i-1 ans = 0.1 mid1 = (left + right + ans) / 2 mid2 = (left + right - ans) / 2 a=asdf(mid1) c=asdf(mid2) if a > c : right = mid1 else : left = mid2 b=(left+right) / 2 print ("左极限=%s,右极限=%s,极小值x=%s" %(left,right,b))
规划类 线性规划 使用第三方库:PULP,通过LpProblem建立优化问题 ,其函数原型如下
1 pulp.LpProblem(name='NoName' , sense=LpMinimize)
函数参数:
1 2 name:用户自定义的问题名(用于输出信息) sense:LpMinimize(最小)/LpMaximize(最大)
例题
代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 import pulpMyProbLP = pulp.LpProblem("LPProblemDemo01" ,sense=pulp.LpMaximize) x1 = pulp.LpVariable('x1' , lowBound=0 , upBound=7 , cat='Continuous' ) x2 = pulp.LpVariable('x2' , lowBound=0 , upBound=7 , cat='Continuous' ) x3 = pulp.LpVariable('x3' , lowBound=0 , upBound=7 , cat='Continuous' ) MyProbLP += 2 *x1 + 3 *x2 - 5 *x3 MyProbLP += (2 *x1 - 5 *x2 + x3 >= 10 ) MyProbLP += (x1 + 3 *x2 + x3 <= 12 ) MyProbLP += (x1 + x2 + x3 == 7 ) MyProbLP.solve() print ("Status:" , pulp.LpStatus[MyProbLP.status]) for v in MyProbLP.variables(): print (v.name, "=" , v.varValue) print ("F(x) = " , pulp.value(MyProbLP.objective))
1 MyProbLP = pulp.LpProblem("LPProbDemo1" , sense=pulp.LpMaximize)
1 x1 = pulp.LpVariable('x1' , lowBound=0 , upBound=7 , cat='Continuous' )
x1是用户定义的变量名。
参数 lowBound、upBound 用来设定决策变量的下界、上界;可以不定义下界/上界,默认的下界/上界是负无穷/正无穷。
参数 cat 用来设定变量类型,可选参数值:Continuous表示连续变量(默认值)、Integer 表示离散变量(用于整数规划问题)、 Binary 表示0/1变量(用于0/1规划问题)。
添加目标函数使用 “问题名 += 目标函数式” 格式。
添加约束条件使用 “问题名 += 约束条件表达式” 格式。
1 2 3 4 5 6 7 MyProbLP.solve() print ("Status:" , pulp.LpStatus[MyProbLP.status]) for v in MyProbLP.variables(): print (v.name, "=" , v.varValue) print ("F(x) = " , pulp.value(MyProbLP.objective))
线性规划实例推荐
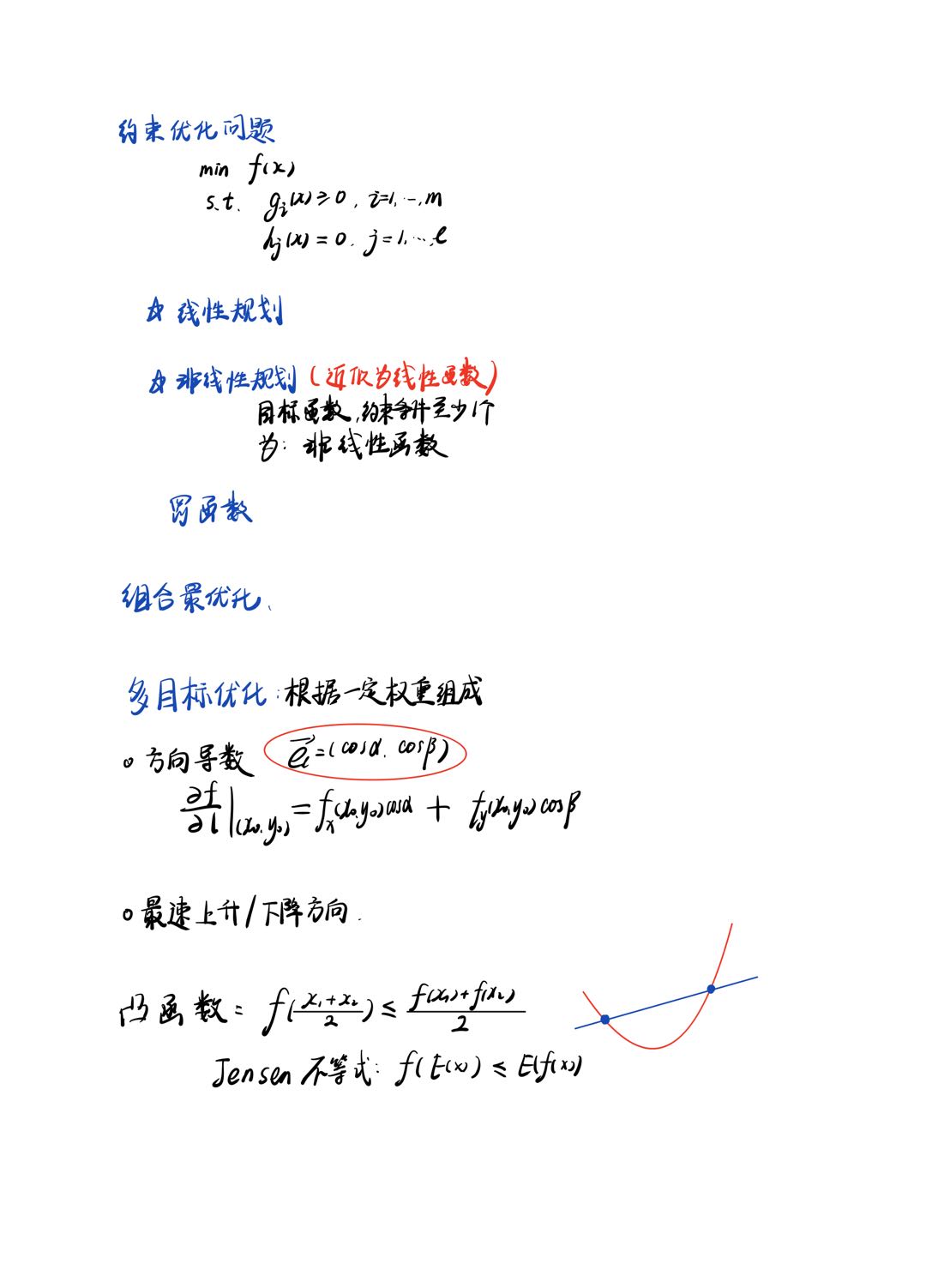
非线性 非线性规划实例推荐
例程
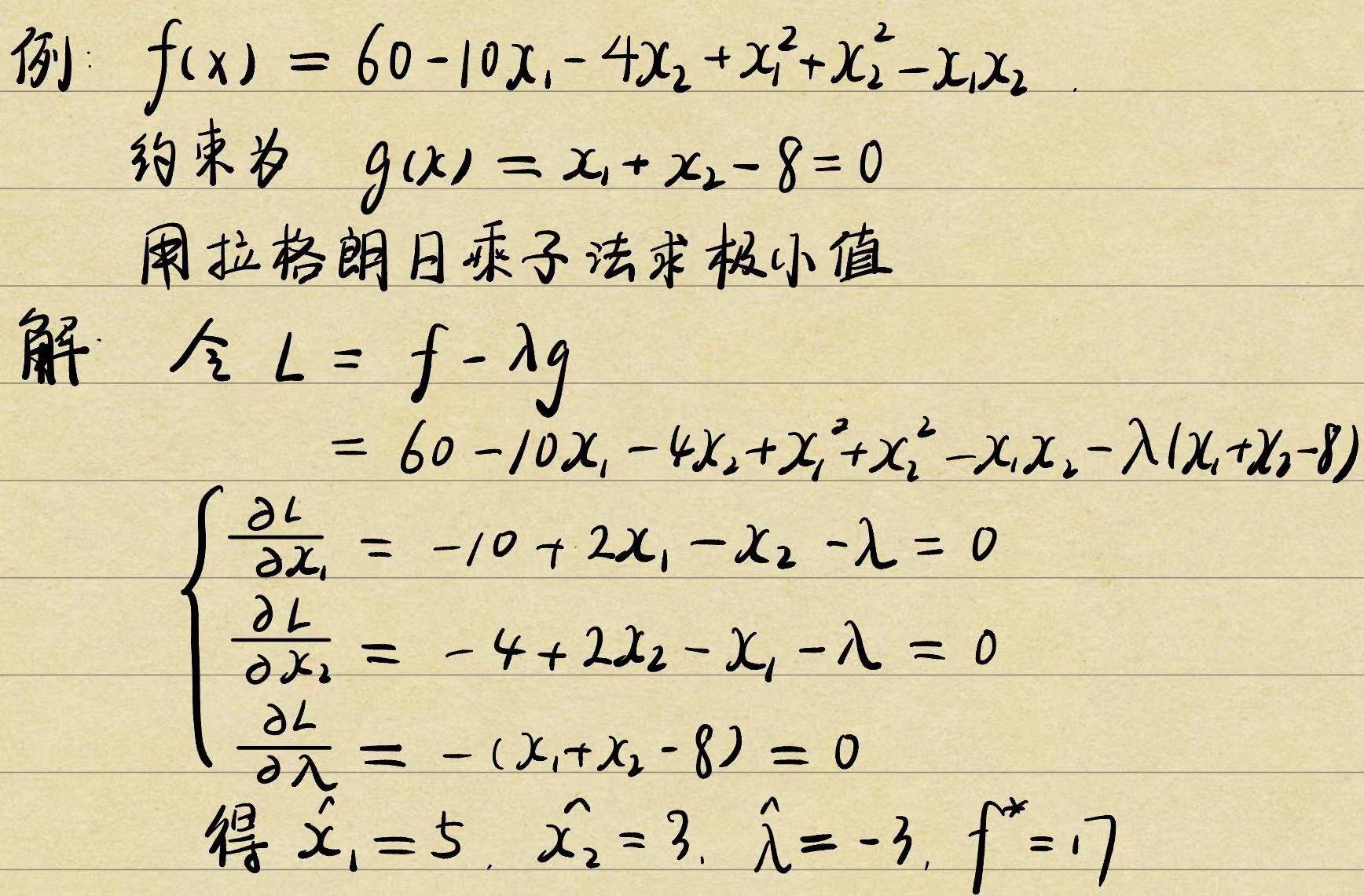
1 2 3 4 5 6 7 8 9 10 11 12 13 14 from sympy import *x1 = symbols("x1" ) x2 = symbols("x2" ) lamda = symbols("lamda" ) L = 60 - 10 *x1 - 4 *x2 + x1*x1 + x2*x2 - x1*x2 - lamda * (x1 + x2 - 8 ) difyL_x1 = diff(L, x1) difyL_x2 = diff(L, x2) difyL_lamda = diff(L, lamda) ans = solve([difyL_x1, difyL_x2, difyL_lamda], [x1, x2, lamda]) print (ans)
KKT条件讲解推荐
例程
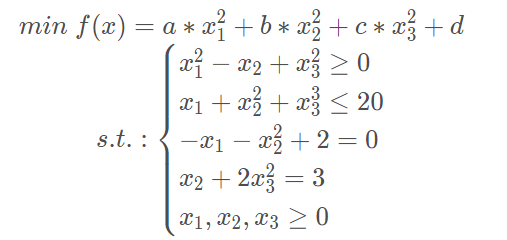
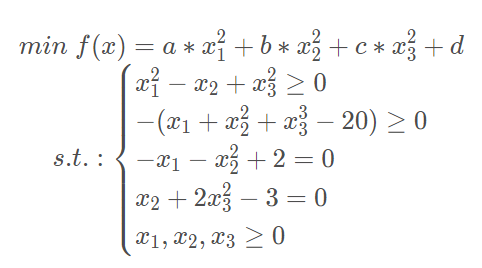
minimize() 函数中对约束条件的形式定义为 f(x)>=0,因此要将问题的数学模型转换为标准形式:
程序说明
函 数
1 2 3 {‘type ’: ‘ineq’, ‘fun’: functionname}
必需:目标函数、搜索初值点
可选:指定优化方法、边界条件、约束条件
例程代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 from scipy.optimize import brent, fmin, minimizeimport numpy as npdef objF5 (args ): a,b,c,d = args fx = lambda x: a*x[0 ]**2 + b*x[1 ]**2 + c*x[2 ]**2 + d return fx def constraint1 (): cons = ({'type' : 'ineq' , 'fun' : lambda x: (x[0 ]**2 - x[1 ] + x[2 ]**2 )}, {'type' : 'ineq' , 'fun' : lambda x: -(x[0 ] + x[1 ]**2 + x[2 ]**3 - 20 )}, {'type' : 'eq' , 'fun' : lambda x: (-x[0 ] - x[1 ]**2 + 2 )}, {'type' : 'eq' , 'fun' : lambda x: (x[1 ] + 2 *x[2 ]**2 - 3 )}) return cons b = (0.0 , None ) bnds = (b, b, b) cons = constraint1() args1 = (1 ,2 ,3 ,8 ) x0 = np.array([1. , 2. , 3. ]) res1 = minimize(objF5(args1), x0, method='SLSQP' , bounds=bnds, constraints=cons) print ("Optimization problem (res1):\t{}" .format (res1.message)) print ("xOpt = {}" .format (res1.x)) print ("min f(x) = {:.4f}" .format (res1.fun))
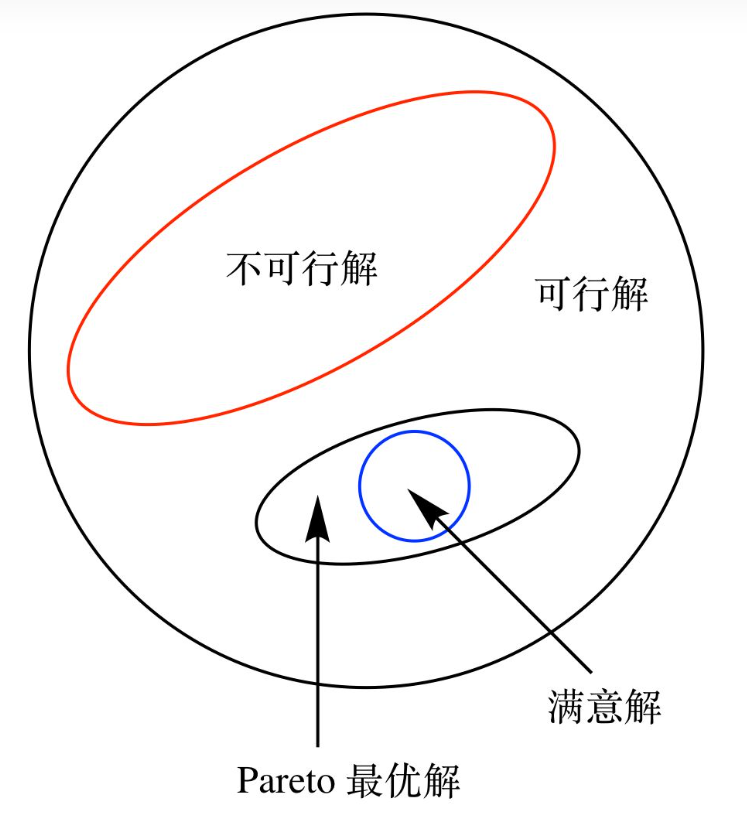
多目标优化 在生活中的优化问题,往往不只有一个优化目标,并且往往无法同时满足所有的目标都最优,我们一般采用“帕累托最优”来衡量解是否优秀。
帕累托最优:指资源分配的一种理想状态。假定固有的一群人和可分配的资源,从一种分配状态到另一种状态的变化中,在没有使任何人境况变坏的前提下,使得至少一个人变得更好。帕累托最优状态就是不可能再有更多的帕累托改进的余地
多目标进化优化算法即利用进化算法结合多目标优化策略来求解多目标优化问题。经典而久经不衰的多目标优化算法有:NSGA2、NSGA3、MOEA/D等。其中NSGA2和NSGA3是基于支配的MOEA(Multi-objective evolutionary algorithm),而MOEA/D是基于分解的MOEA。
常用模型:
线 性 加 权
对于第相互独立 的情况,但是由于过程简单便捷,目前被广泛应用。
基 于 相 互 关 系
上面是计算机网络中延迟和吞吐量综合优化过程中常用的Power公式,可以用来评价网络中资源分配策略的有效性,用以确定最优负载;亦可用来评价Web服务的效率。
帕 累 托 最 优
[1]唐云岚,赵青松,高妍方,陈英武.Pareto最优概念的多目标进化算法综述[J].计算机科学,2008(10):25-27+57.
不需要对目标进行缩放和归一化,也不需要设定或者引入新的参数、变量(如权重、界限值),直接基于原始目标函数和值进行操作,可以适用于任何目标、任何函数.它不会丢失目标函数和解的信息,解的优劣可以较好保证。但帕累托模型的最优解是一个集合,其中包含不止一个最优解,因此要穷尽并求出所有的帕累托最优解有一定的难度。
常用解法与推荐论文:
进 化 算 法
[1]公茂果,焦李成,杨咚咚,马文萍.进化多目标优化算法研究[J].软件学报,2009,20(02):271-289.
神 经 网 络
[1]马永杰,云文霞.遗传算法研究进展[J].计算机应用研究,2012,29(04):1201-1206+1210.
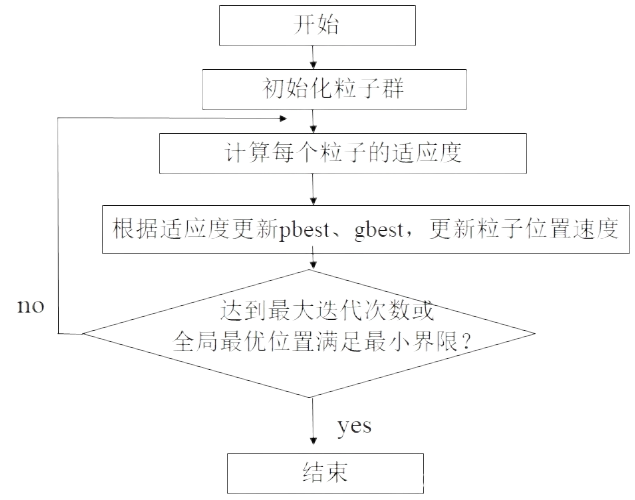
粒 子 群 算 法
[1]张利彪,周春光,马铭,刘小华.基于粒子群算法求解多目标优化问题[J].计算机研究与发展,2004(07):1286-1291.
粒子群算法的思想源于对鸟类捕食行为的研究,模拟鸟集群飞行觅食的行为,鸟之间通过集体的协作使群体达到最优目的。 设想这样的一个场景,一群鸟在随机的搜索食物,在某块区域里有一块食物,所有的鸟都不知道食物在哪里,但是他们可以感受到当前的位置离食物还有多远,此时找到食物的最优策略是什么?
答案是:搜寻目前离食物最近的鸟的周围区域,根据自己的飞行经验判断食物的所在。
GitHub上面一个封装了7种启发式人工智能算法的第三方库:scikit-opt
文档